Open this article in your preferred AI tool and ask it to summarize the key points.
How reliable is robotic picking in real warehouse operations?
Anyone can make robotic picking work in a lab. The real challenge comes with making it work reliably at scale in live warehouses, with changing SKUs, messy totes, unpredictable packaging, and strict SLAs.
Robotic picking has been at the foundation of Brightpick from day one. Before we founded Brightpick in 2021, our team had already spent years working on robotic manipulation at Photoneo. That work saw the team deploy over 1,000 robotic picking cells in industrial environments and factories.

That experience became the foundation for Brightpick’s mobile manipulators. It is what allows them to go beyond just moving products around the warehouse and to identify and pick items directly from storage.
Here is how Brightpick makes robotic picking work reliably at scale in real warehouse operations.
Our multimodal AI stack
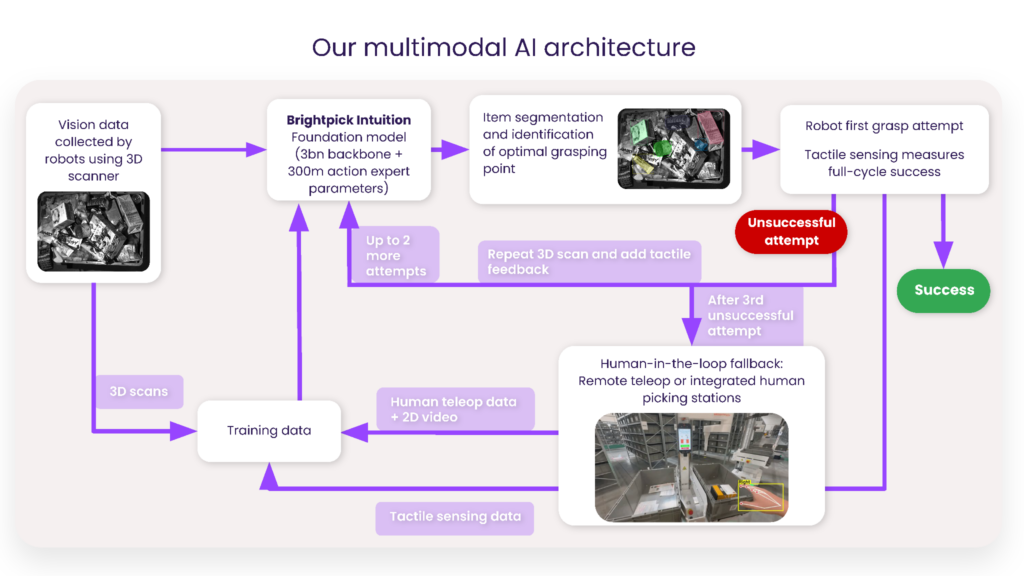
Brightpick robots are powered by Intuition, our multimodal AI that combines vision and tactile sensing.
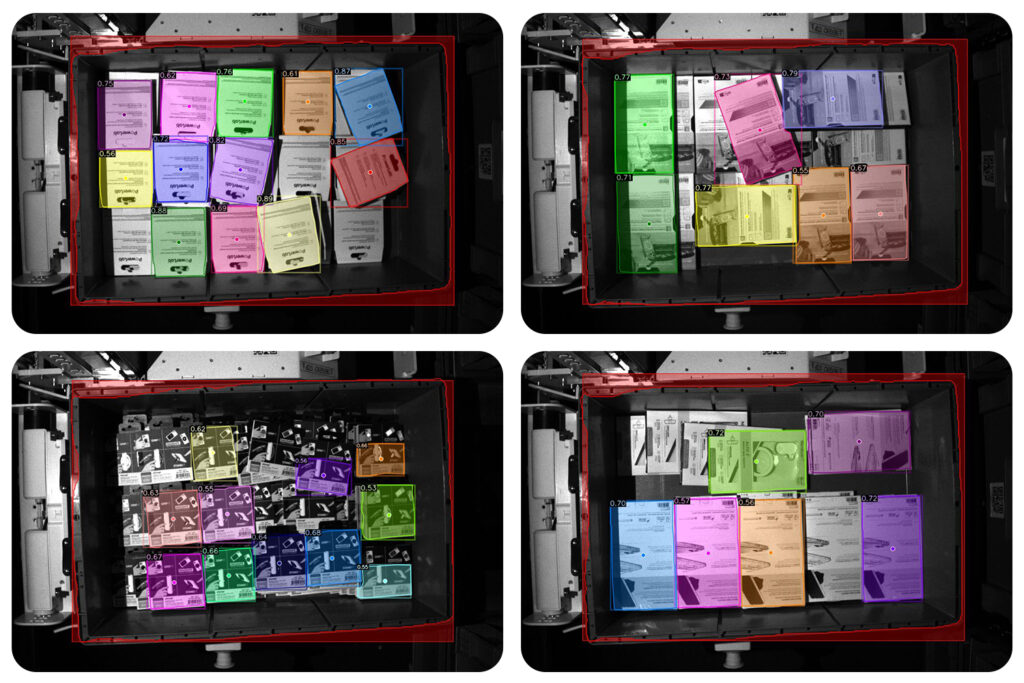
With 3D scanning, our robots first identify and segment individual items, generate a variable set of potential grasp points, and score each candidate according to expected success before selecting the best item to pick.
Tactile feedback inside the gripper allows the robot to optimize its grasp in real time and confirm a successful pick throughout the motion. For example, the gripper can detect when an item is held too loosely, adjust its grip before the pick, and recognize if the item is dropped too early in the cycle. This gives the robot feedback beyond what a camera alone can see.
For the first pick attempt, Brightpick Intuition uses a traditional ML-based neural network with 30M parameters. This lightweight model runs directly on each robot, enabling fast, low-latency processing while still achieving a success rate of over 98%.
If the first pick attempt is unsuccessful, the robot falls back to a VLA-based model with a 3B-parameter backbone and a 300M-parameter action expert. This larger model is hosted on the warehouse’s on-site server and communicates with the robots over the local Wi-Fi network. By combining these two models, Brightpick robots achieve pick success rates of over 99.7%.
What happens when the robot cannot pick an item?
For warehouse operators, this is one of the most important questions. Exceptions are inevitable in real-world operations, whether they are caused by robot hardware issues, damaged packaging, incorrect tote replenishment by human operators, or other unexpected edge cases.
In the event that a Brightpick robot cannot pick an item on its own, it automatically routes the task to a human-in-the-loop. There are two main fallback options:
1. Remote teleoperation, where a human operator remotely guides the robot to pick an item.
2. Integrated goods-to-person stations, where the robot brings the tote to a human operator who completes the pick manually.
The important part is that these fallbacks do not require manual workarounds. They are built into and automatically controlled by our fleet orchestration software. That means exceptions can be handled automatically without stopping the operation or requiring warehouse teams to manually chase down problems.
Learning from every exception
Every robot intervention becomes valuable training data for our AI, helping improve performance over time. If a human operator assists the robot through teleoperation, that intervention is captured as training data for future picks. If an item is picked at a goods-to-person station, that interaction is captured using 2D cameras to understand how the human completed the pick.
This creates a continuous feedback loop. The system learns from real warehouse exceptions, not just lab testing or controlled environments. Over time, this improves the AI’s ability to handle unusual items, difficult packaging, changing SKU mixes, and the edge cases that appear in live operations.
The Brightpick AI picking workflow in steps:
1. The robot scans the tote using 3D vision.
2. Brightpick Intuition analyzes the scene and identifies the best grasp point.
3. The robot attempts the pick.
4. Tactile sensing improves grip and measures whether the pick succeeded through the full cycle.
5. If needed, the robot retries using a higher-parameter VLA model with updated vision and tactile feedback.
6. If the robot still cannot complete the pick, the system automatically triggers a human-in-the-loop fallback.
7. Data from that exception is fed back into the AI model.
Reliability comes from the whole system, not just the robot
Picking reliability is not just about maximizing success on the easiest items. It is a tradeoff between short-term success rates and the total amount of work that can be automated. As robots handle more complex SKUs, first-attempt error rates may increase. But if those picks can still be completed through intelligent fallback strategies, the system can automate more work overall and deliver greater operational efficiency.
That is why Brightpick approaches reliability at the system level. By combining multimodal AI, automated fallback logic, and human-in-the-loop support, Brightpick helps customers maintain 100% operational success while creating continuous feedback loops that make the robots smarter over time.
About Brightpick
Brightpick is a leader in AI-powered robotic solutions for warehouses. The company’s multi-purpose AI robots enable warehouses of any size to fully automate order picking, buffering, consolidation, dispatch, and stock replenishment. The award-winning Brightpick solution takes just weeks to deploy and allows companies to keep their warehouse labor to a minimum. With offices in the US and Europe, Brightpick has more than 250 employees and hundreds of AI robots deployed with customers.
- SHARE
-

-
-
-
- SHARE
-
-
-
-